Stability Radius Optimization and Nonlinear Control of a Segway Style Robot
 See description given below.
See description given below.
Date and Time
Location
Hosts
Registration
-
 Add Event to Calendar
Add Event to Calendar
- 161 Warren St.
- Newark, New Jersey
- United States 07102
- Building: ECE -- Electrical and Computer Engineering
- Room Number: ECE 202
- Click here for Map
- Contact Event Host
- Dr. David Haessig david.haessig@baesystems.com
- Starts 01 April 2012 08:00 PM UTC
- Ends 16 April 2012 08:00 PM UTC
- No Admission Charge
Speakers
Sam Nazari
Stability Radius Optimization and Nonlinear Control of a Segway Style Robot
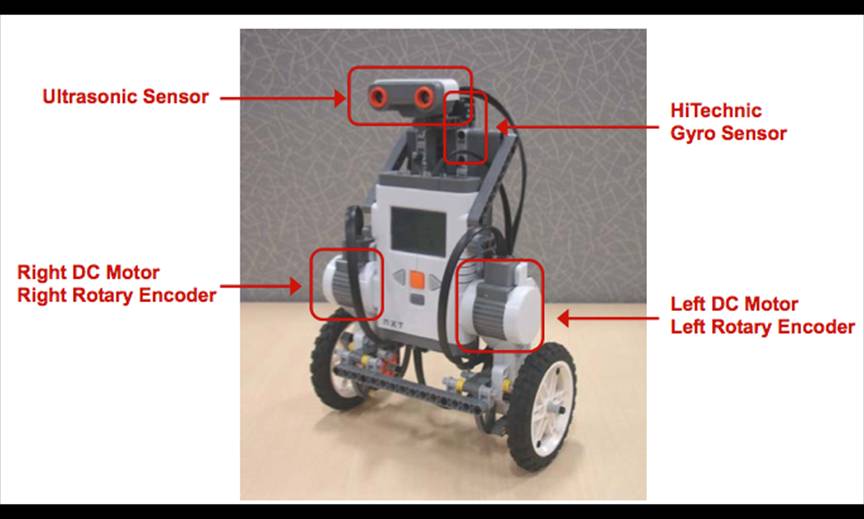
Analysis and control of nonlinear systems that can be brought into a state dependent representation known as extended linearization is a flourishing area in robust control. Under this formulation, conventional linear analysis techniques may be adapted to study the stability, optimality, and robustness properties of nonlinear systems, such as the Segway Style Robot. In real world applications, these systems are subject to parametric uncertainty and estimating the radius of stability becomes difficult since the closed-loop system equations are not available explicitly. A method for obtaining the upper bound for the radius of stability in this class of systems will be presented and illustrated on the Segway Style robot. It will be shown that the stability radius around a suitable domain for the robot can be obtained by computing the largest singular value of an overvalued matrix with special properties. Additionally, a property of extended linearization is that it relies on a non-unique factorization of the system dynamics to bring the nonlinear system into a pseudo-linear form referred to as the State Dependent Coefficient (SDC) parameterization. Under system uncertainty, each SDC parameterization for the Segway Style robot will produce its own radius of stability in a region of interest in the state space. A method for obtaining the SDC parameterization resulting in the maximum radius of stability for the original nonlinear system in the region of interest will be presented and demonstrated on the Segway Style robot. It will be shown that the problem of finding the maximum radius of stability from a hyperplane of SDC parameterizations can be reduced to constrained minimization of the spectral norm of a comparison system. In order to navigate the Segway Style robot over a seesaw obstacle, it is necessary to accurately control the robots turning rate and wheel angular velocity while simultaneously maximizing the controller bandwidth. Due to sensor limitations, the robots wheel angular rate is not directly available. Conventional robot models use a finite differencing operation in order to obtain the necessary rates. This leads to noisy signals that couple into the control loop causing degraded controller bandwidth and undesirable performance. It will be shown that a simple Kalman Filter can be used to alleviate this problem and to extend the controllers bandwidth. To surmount the seesaw obstacle, ultimately it is necessary to limit the rate and acceleration of the robots wheels. A method utilizing spectral windows as basis, functions will be presented to accomplish this task.
Biography: Sam Nazari is currently a Senior Member of Technical Staff at the Charles Stark Draper Laboratory in Cambridge MA. Prior to joining Draper Laboratories, he was an Application Engineer for the MathWorks and a Systems Engineer for various defense contractors. Sam received his MSEE in Control Systems and Signal Processing from the department of Electrical and Computer Engineering at Northeastern University in 2011 and his BSEE from the New Jersey Institute of Technology in 2003. Sam is currently pursuing a PhD in Control Systems and Signal Processing from Northeastern University.
Email:
Agenda
6:30-7:30 PM Technical talk.