Technical Briefs on Modal Array Signal Processing and Undersea Tracking
* Note: Date moved to Thursday, Jan. 13th!
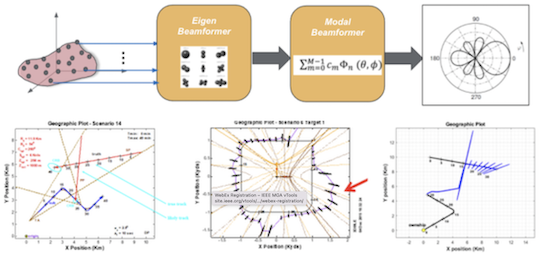
Modal Array Signal Processing: A Brief Introduction
The scalar acoustic pressure sound field obeys the Helmholtz equation. It can be shown that under certain restrictions, pressure or particle velocity measurements on a closed surface can be used to uniquely infer the entire acoustic field. This observation leads to a different beamforming methodology for volumetric arrays where instead of combining filtered outputs of individual sensors, the measurements can be used to spatially decompose the array response in terms of an orthonormal basis defined by the array surface resulting in “eigenbeams.” Modal beamforming is then performed by linearly processing over the eigenbeams to realize desired beampatterns. Since the number of modes can be significantly less than the number of sensors there is a computational advantage over classical methods. Additionally, modal processing offers a layer of abstraction (the “eigenbeams space”) to accommodate a wide variety of array geometries which simplifies downstream processing tasks. However, sensitivities to shape deformation, such as an array in typical oceanic currents may undergo, are not amenable to classical error tolerance analysis and novel approaches to "array-healing" must be explored. To clarify these concepts an example of a moored cylindrical array of sensors in a typical ocean environment is shown.
Undersea Tracking: From Kalman Filters to Particle Flow Filters
As foreign navies become increasingly more prolific and more capable and foreign submarines become quieter, the US Navy is working to enhance their undersea situational awareness capability. The goal is to create a Single Integrated Undersea Picture (SIUP) to monitor large volumes of the ocean. Undersea tracking has always been challenging due to high densities of dynamically moving contacts, environmental conditions causing shadow zones resulting in intermittent tracks, low SNR conditions, non-Gaussian noise, and non-linearities in the system and measurement models. Over the years, a myriad of different contact tracking solutions have been proposed with varying degrees of success, starting with simple Kalman filters and most recently particle flow filters. This brief will walk us through the history of sonar tracking algorithms focusing mainly on submarine sonar tracking systems. Variants of the Kalman filter will be discussed along with Multiple Hypothesis Tests, Interacting Multiple Models, Maximum Likelihood Estimators, Particle Filters, and Particle Flow filters. Recent developments in deterministic and stochastic flow models will also be discussed. In numerical experiments, particle flow filters have been shown to reduce computational complexity by many orders of magnitude relative to standard particle filters or other state-of-the-art algorithms for the same filter accuracy. Moreover, particle flow filters can reduce the filter errors by many orders of magnitude relative to the extended Kalman filter or other state-of-the-art algorithms for difficult nonlinear non-Gaussian problems.
Date and Time
Location
Hosts
Registration
-
 Add Event to Calendar
Add Event to Calendar
Loading virtual attendance info...
- The Galley Grille at White's of Westport
- 66 State Road
- Westport, Massachusetts
- United States 02790
- Click here for Map
- Starts 01 December 2021 05:00 AM UTC
- Ends 13 January 2022 10:00 PM UTC
- Admission fee (optional) ?
Speakers
 Dr. Kevin Bongiovanni of Raytheon Technologies
Dr. Kevin Bongiovanni of Raytheon Technologies
Biography:
Kevin Bongiovanni is an Engineering Fellow for the System Design and Architecture department at Raytheon Technologies where he provides technical leadership across all aspects of undersea and sea-surface systems. Kevin has a Ph.D. in Applied Mathematics (Rensselaer Polytechnic Institute, 1995), M.S. Applied Mathematics (Rensselaer Polytechnic Institute, 1993), and a B.S. Mathematics (Rensselaer Polytechnic Institute, 1988). He has also just completed a Master’s in Oceanography from the Graduate School of Oceanography, University of Rhode Island 2021. Dr. Bongiovanni has over 33 years of experience spanning engineering and research positions in government laboratory (Naval Undersea Warfare Center, Institute for Naval Oceanography), industry (TASC, BBN Technologies, Applied Physical Sciences, Inc.) and academic environments (Rensselaer Polytechnic Institute, University of Delaware). His research interests include applied mathematics, signal processing, underwater acoustics, noise & vibration, uncertainty quantification and oceanography.
Email:
Address:Portsmouth, Rhode Island, United States, 02871
 Dr. Ken McPhillips of Raytheon Technologies
Dr. Ken McPhillips of Raytheon Technologies
Biography:
Kenneth J. McPhillips was born on November 1, 1957 in Fall River, MA. He received the B.A. degree in mathematics from Providence College, Providence, RI in 1979, the M.S. degree in mathematics from the University of Rhode Island, Kingston, RI, in 1996 and the Ph.D. degree in applied mathematical sciences from the University of Rhode Island in 2007. As a Senior Principal Engineer at Raytheon Missiles and Defense Systems in Portsmouth, RI, with over 40 years of experience, Dr. McPhillips designed, developed, integrated, tested and analyzed passive sonar signal processing and target tracking algorithms for various domestic and foreign surface and submarine combat control systems. He has designed various signal processing and tracking algorithms for active lightweight and heavyweight torpedo systems as well as a variety of mine hunting sonar systems. He also developed passive physics based methods for range and depth localization as well as passive contact classification algorithms. His research interests include sensor array signal processing, detection and estimation theory, contact classification, target tracking and data fusion.
Email:
Address:Portsmouth, Rhode Island, United States, 02871
Agenda
5:30 PM - Cocktails (cash bar)
6:00 PM - Modal Array Signal Processing
6:30 PM - Particle Flow Filters for Tracking
7:00 PM - Dinner*
*Please register in advance; Dinner menu preview is available at www.galleygrille.com