IEEE Joint Systems, Man, and Cybernetics and Aerospace and Electronic Systems Meeting
The April joint SMC/AESS brown bag lunch meeting features a topic was recently presented at the IEEE/ION Position Location and Navigation Symposium (PLANS) conference where it won the Walter R. Fried Best Paper Award.
Date and Time
Location
Hosts
Registration
-
 Add Event to Calendar
Add Event to Calendar
- 6220 Culebra Road
- (Internal address: 229 Avenue D)
- San Antonio, Texas
- United States 78238
- Building: Southwest Research Institute
- Room Number: Building 51 (Archives)
- Click here for Map
- Contact Event Host
- Co-sponsored by Southwest Research Institute
- Starts 12 April 2016 01:00 PM UTC
- Ends 28 April 2016 05:00 PM UTC
- No Admission Charge
- Menu: Please bring your own lunch.
Speakers
 Kris Kozak of Southwest Research Institute
Kris Kozak of Southwest Research Institute
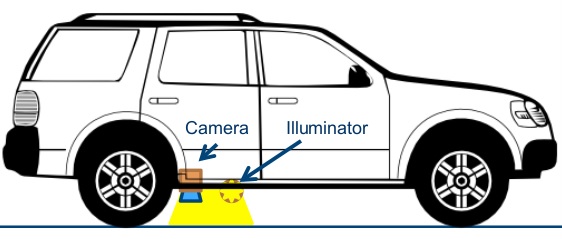
Ranger: A Ground-facing Camera-based Localization System for Ground Vehicles
This presents an overview of the Ranger localization system and its constituent technologies and algorithms. Ranger is a high-precision localization system for ground vehicles that performs map-based localization using a ground-facing camera. Ranger uses commercially available hardware, including a camera, lights, and a computer, in combination with auxiliary localization sensors and a custom state estimator, to produce a complete high-precision positioning solution suitable for feedback control of an automated vehicle. Ranger was originally conceived and designed to address the accuracy and availability problems of GPS, and can operate independent from or as a supplement to GPS and other GNSS positioning systems. Ranger position measurements are made by matching live ground imagery to imagery stored in a map. The image matching process uses a feature-based approach that yields a high positive match rate with a vanishingly small false positive rate. The precision of the Ranger measurements is shown to be on the order of centimeters, and the actual lateral positioning performance of MARTI, one of Southwest Research Institute’s automated vehicles, autonomously driving a test route is shown to be repeatable over many runs to within 2 cm.
Biography:
Dr. Kozak is a Principal Engineer in the Unmanned Systems Section at Southwest Research Institute (SwRI). His background and interests include robotics, vehicle localization, signal processing, pattern recognition and machine learning, rigid and flexible body dynamics, kinematics, vibrations, controls, manipulator design, and robust command generation. Dr. Kozak has extensive experience in modeling and simulation of complex multi-body systems using a variety of classical and analytical dynamics techniques.
Dr. Kozak has worked in a variety of areas, including localization, perception, intelligence and control for autonomous vehicles, mechanical system diagnostics using advanced signal processing techniques, and reliability of complex mechanical systems. Dr. Kozak has been deeply involved in the development of all of the full-scale autonomous vehicles that have been created by the section. His experience in the area of vehicle autonomy ranges from mechanical and electrical system design and integration, to the implementation of algorithms for high-level perception and intelligence. Dr. Kozak contributed extensively to the Mobile Autonomous Robotics Technologies Initiative (MARTI) Internal Research and Development (IR&D) in the development of an autonomous vehicle. He is currently working on robotics projects for both government and commercial clients.
Dr. Kozak’s most recent work has been in the area of robust localization for ground vehicles. He has developed and implemented a variety of localization technologies that focus on providing reliable and accurate localization during periods when global positioning system (GPS) is unavailable or actively denied. These techniques include relative localization approaches, such as traditional inertial navigation and visual odometry, and true global localization using image-based maps.
Dr. Kozak has also worked in the area of system diagnostics, and specifically in the use of vibration analysis techniques as a means of detecting damage in mechanical systems. He has applied these techniques to a variety of rotating machinery components from gas turbines to gearboxes and has developed similar novel techniques for inspecting high voltage electrical insulators.
Dr. Kozak’s doctoral research focused on the problem of minimizing command-induced, transient vibration in nonlinear robotic systems such as parallel manipulators. As a post-doctoral researcher at Tsinghua University in Beijing, China, Dr. Kozak performed research in the area of static and dynamic modeling and vibration suppression of large-scale cable-driven robotic manipulators.
Email:
Address:P.O. Drawer 28510, , San Antonio, Texas, United States, 78228
Kris Kozak of Southwest Research Institute
Ranger: A Ground-facing Camera-based Localization System for Ground Vehicles
Biography:
Email:
Address:San Antonio, Texas, United States
Agenda
This meeting will also be webcast using LoopUp:
First, click: https://join.loopup.com/2Pz9AQ8
Know who’s on and who’s speaking
LoopUp calls your phone – no need to dial in
And view when the leader shares their screen
Or, if you are offline, dial in:
(by joining, you agree to the privacy policy at loopup.com)
Participant Access Code: 2034582#
USA: +1 (877) 746-4263
UK (Local): +44 (0) 20 7019 0492