Actuator Design for In-Space Operations
#robotics
#actuators
#research
#space
Abstract: Full state feedback (FSF) controllers for series elastic actuators bridge the gap between impedance and admittance controllers. For robot manipulators-which must stably accomplish both stiff and soft behaviors-FSF controllers are ideal candidate joint controllers. Although previous work on FSF gain tuning has derived necessary and sufficient conditions on controller passivity with time-delay and derivative filtering, they fail to achieve their target impedance behavior due to the large nonlinear friction found in the high gear-reduction actuators of robot manipulators. In this talk, I will discuss the history, advantages, and disadvantages of adaptive friction models and friction observers. I will then present a novel, back-drivable friction compensator that combines an adaptive Karnopp friction model in parallel with dual disturbance observers for model training and disturbance attenuation. Low-speed time-domain demonstrations show an improvement in trajectory tracking for the combined compensator over separate modeled or unmodeled approaches.
Read more about the lab at https://stories.tamu.edu/news/2024/01/10/engineering-leads-collaboration-for-in-space-operations-technologies/
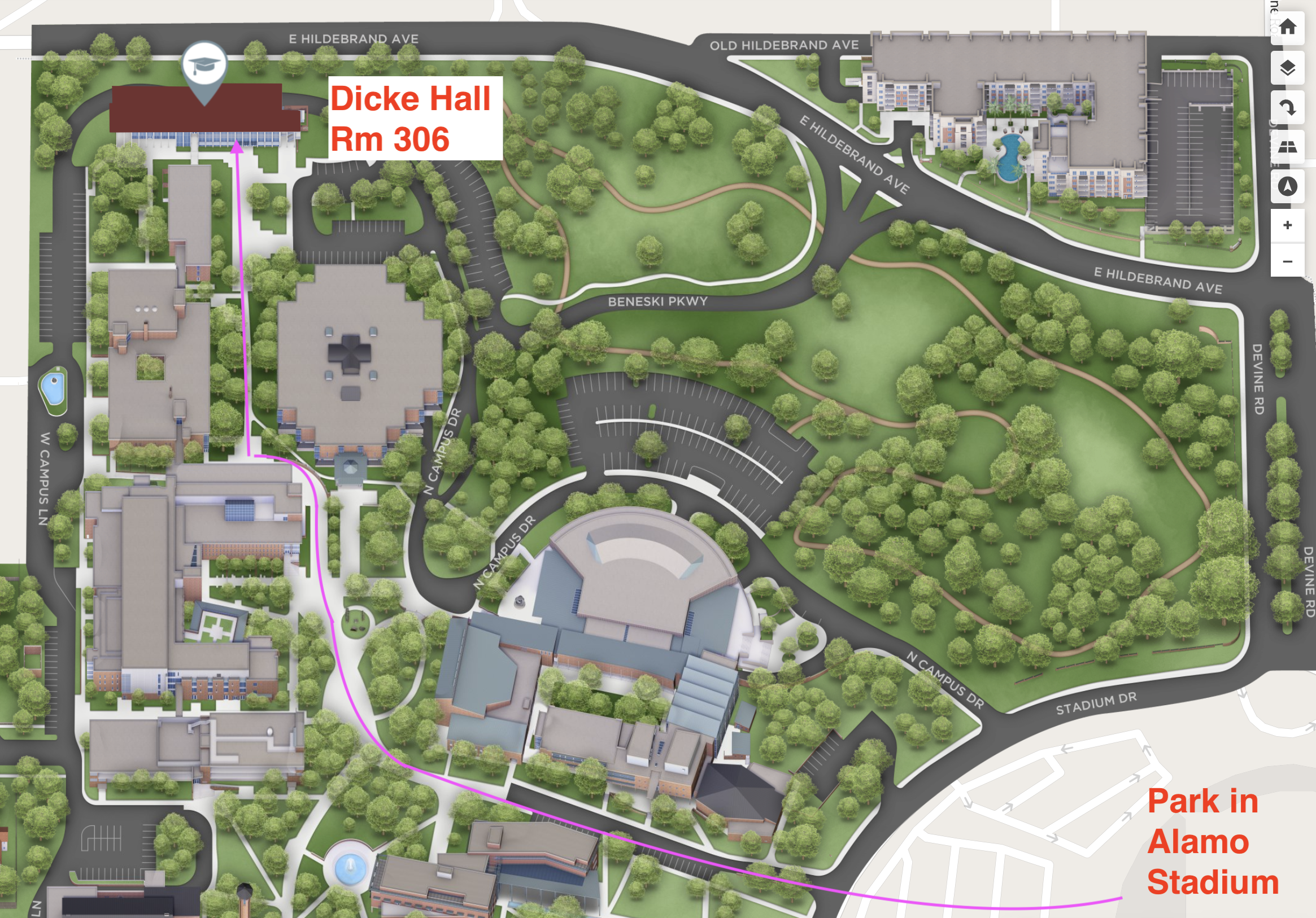
Park at Alamo Stadium - https://map.trinity.edu/?id=1858#!ct/48724,71654,71656,71657,71659,71660?m/991683?s/?mc/29.46316899999998,-98.48067500000002?z/18?lvl/0?share
Date and Time
Location
Hosts
Registration
-
 Add Event to Calendar
Add Event to Calendar
Loading virtual attendance info...
-
West Campus Lane
-
San Antonio, Texas
-
United States
78212
-
Building:
Dicke Hall
-
Room Number:
306
-
Click here for Map

- Starts
05 June 2025 05:00 AM UTC
- Ends
26 June 2025 05:00 AM UTC
-
Admission fee
?
- Menu:
Standard Box Lunch, Vegetarian Lunch, No Lunch
Speakers
Zach of Human-Empowering Robotics and Control Lab - Texas A&M University
Topic:
Actuator Design for In-Space Operations
Biography:
PhD Student in Mechanical Engineering
Zach is a Wisenbacker Fellow and is researching robust joint-level impedance controllers for space-rated robotic applications. He is currently developing nonlinear controllers for magnetically geared actuators and high-friction, series-elastic actuators. He received his B.S. in Engineering Science from Trinity University.
https://herc.engr.tamu.edu/people/zachary-moyer/
Agenda
- Gather/Lunch 11:30
- Talk starts at 12:00
